




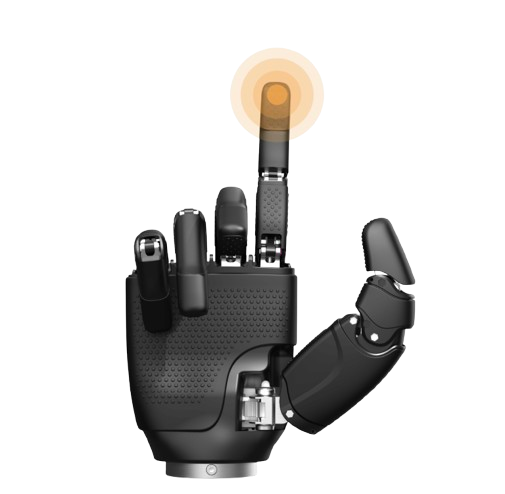
在原有内置⼒传感器基础上⼜在⼿掌表⾯集成了触觉传感器模块 可实时获取掌内各个部位的触觉信息 有助于优化⼿指抓握动作 提⾼操作精细度。 指尖输出⼒达到3kg 抓握⼒与⼈⼿⽆异 可以为您的⼯业⾃动化和智能机器⼈解决⽅案提供更可靠的⽀持。
产品参数
| 左右手型号 | 56E2-L / 56E2-R |
|---|---|
| 控制接口 | RS485, CAN. ModbusTCP |
| 单指主动力 | 3kg |
| 自锁 | 掉电自锁,上电无需找零位 |
| 自由度 | 6 |
| 手指关节数 | 12 |
| 力传感器数量 | 6 |
| 触觉传感器数量 | 5-17 |
| 重量 | 790±10g |
| 工作电压 | DC24V±10% |
| 静态电流 | 0.15A |
| 最大电流 | 4A |
| 重复定位精度 | ±0.20mm |
| 指尖最大输出力 | 30N |
| 拇指横向旋转范围 | >85° |
| 拇指运动角速度 | >130° /s |
| 四指运动角速度 | >200°/s |
*注:以上部分参数随着产品升级可能有所差异,最终参数实际为准。
设计图纸
.png")
资料下载
 灵巧手 E2系列3D模型
灵巧手 E2系列3D模型 灵巧手 E2系列用户手册
灵巧手 E2系列用户手册

