


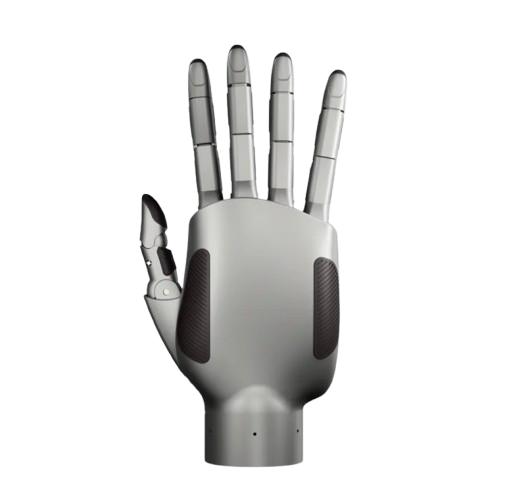
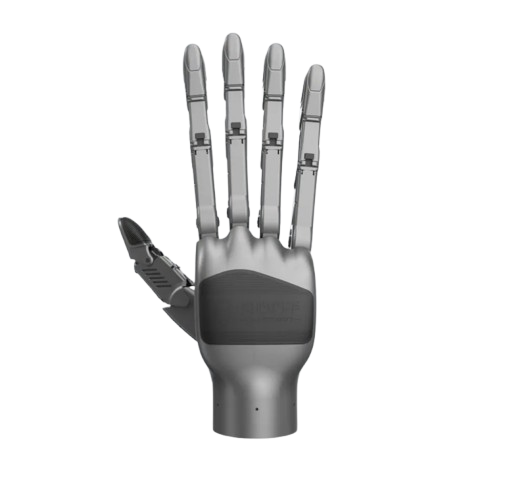




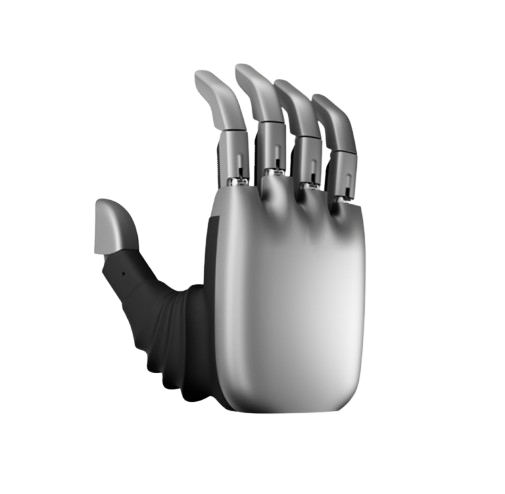

SL30腱驱版灵巧手是一款高仿生、高自由度的机器人手部系统,旨在模拟人类手部运动,满足科研、工业自动化、康复医疗、人工智能交互等多种应用需求。本产品采用腱绳驱动技术,具备精准的抓取与操控能力,同时支持多种通讯协议,便于集成与控制。
产品参数
| 左右手型号 | SL30腱驱版 |
|---|---|
| 控制接口 | ROS/RS485 |
| 主动自由度 | 18+7(主动) |
| 最大负载 | >=8kg |
| 重量 | 1.3kg |
| 工作电压 | DC24V±10% |
| 静态电流 | 0.25A |
| 最大电流 | 1.5A |
| 重复定位精度 | ±0.20mm |
| 拇指最大抓握力 | 9~20N |
| 四指最大抓握力 | 10~20N |
| 握力分辨率 | 0.5N |
| 驱动方式 | 肌腱仿生驱动(腱绳驱动) |
*注:以上部分参数随着产品升级可能有所差异,最终参数实际为准。
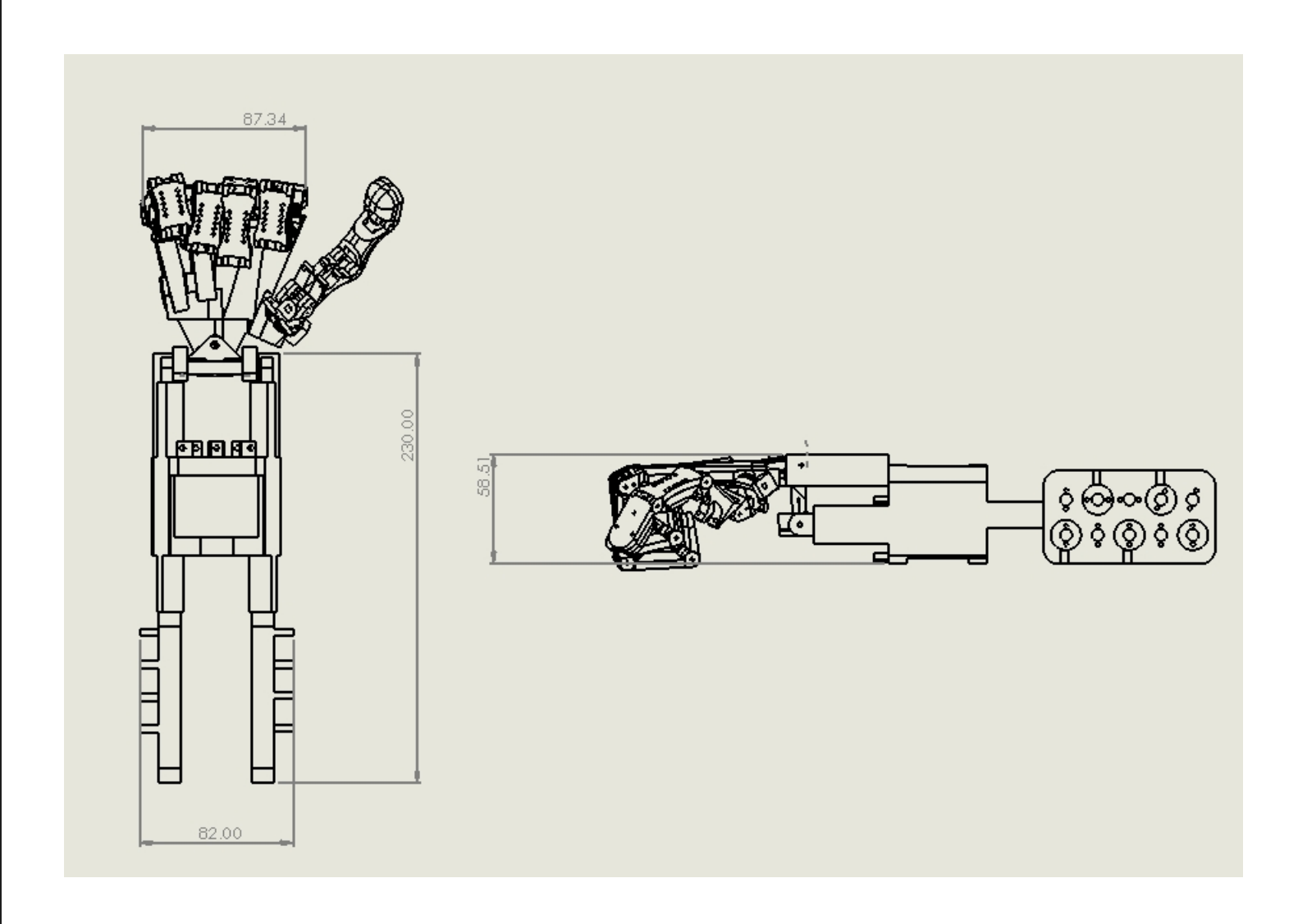
设计图纸
资料下载
 SL30腱驱版产品手册
SL30腱驱版产品手册

