




56DFX系列灵巧手单手可拎起5公斤重水桶 , 指尖抓握力达1.5KG, 适用于机器人未端执行器或假肢等领域 。
产品参数
| 左右手型号 | 56DFX-2L / 56DFX-2R |
|---|---|
| 手腕 | 无 |
| 控制接口 | RS485 |
| 自由度 | 6 |
| 手指关节数 | 12 |
| 重量 | 540g |
| 工作电压 | DC24V±10% |
| 静态电流 | 0.09A |
| 最大电流 | 2A |
| 重复定位精度 | ±0.20mm |
| 拇指最大抓握力 | 15N |
| 四指最大抓握力 | 10N |
| 抓握力分辨率 | 0.50N |
| 拇指横向旋转范围 | >65° |
| 拇指侧摆速度 | 235°/s |
| 拇指弯曲速度 | 150°/s |
| 四指弯曲速度 | 570°/s |
| 手腕侧摆角度 | / |
| 手腕俯仰角度 | / |
| 手腕承载扭矩 | / |
| 左右手型号 | 56DFXW-2L / 56DFXW-2R |
|---|---|
| 手腕 | 有 |
| 控制接口 | RS485 |
| 自由度 | 6+2 |
| 手指关节数 | 12 |
| 重量 | 650g |
| 工作电压 | DC24V±10% |
| 静态电流 | 0.1A |
| 最大电流 | 2A |
| 重复定位精度 | ±0.20mm |
| 拇指最大抓握力 | 15N |
| 四指最大抓握力 | 10N |
| 抓握力分辨率 | 0.50N |
| 拇指横向旋转范围 | >65° |
| 拇指侧摆速度 | 235°/s |
| 拇指弯曲速度 | 150°/s |
| 四指弯曲速度 | 570°/s |
| 手腕侧摆角度 | ±27° |
| 手腕俯仰角度 | ±22° |
| 手腕承载扭矩 | 2NM(不含手重) |
*注:以上部分参数随着产品升级可能有所差异,最终参数实际为准。
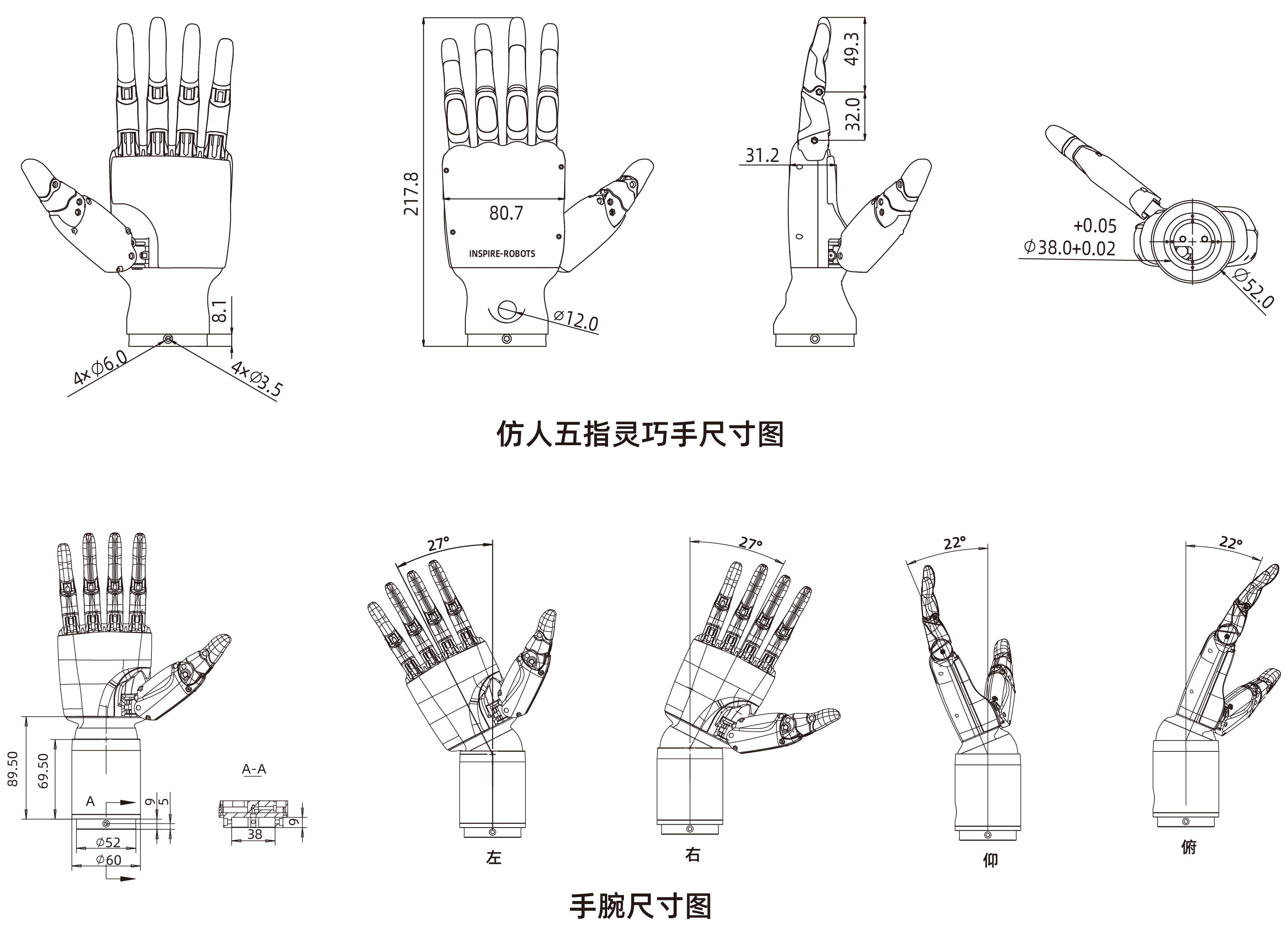
设计图纸
资料下载
 五指灵巧手56DFX系列3D模型
五指灵巧手56DFX系列3D模型 五指灵巧手56DFX系列用户手册
五指灵巧手56DFX系列用户手册

