





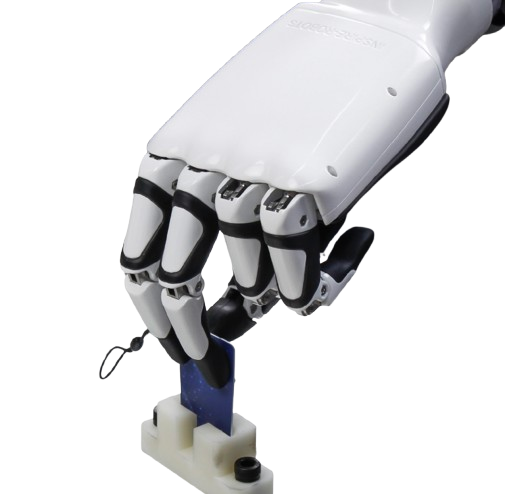
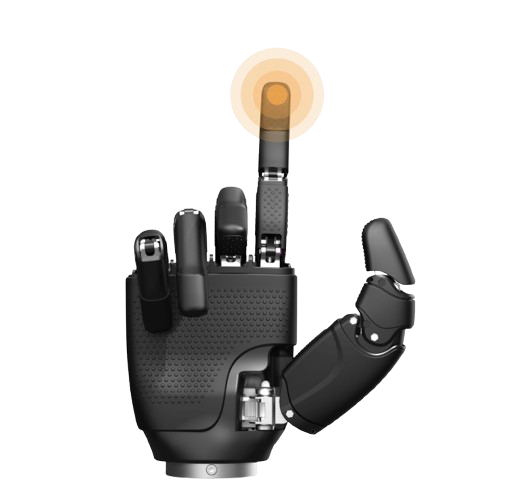
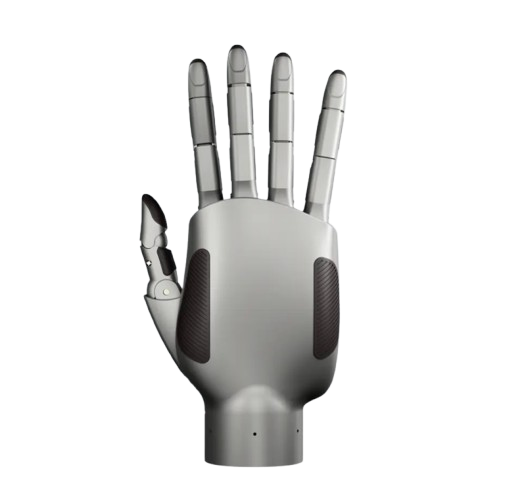
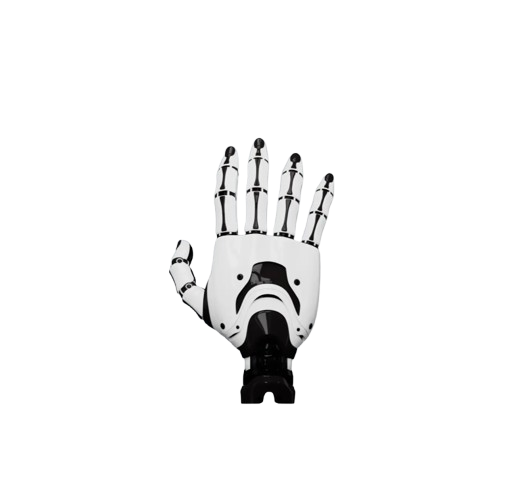
灵巧手产品







苏ICP备2024139441号 Copyright © 2025 萨尔玛智能
苏ICP备2024139441
Copyright 2025 萨尔玛智能
